Urządzenie elektromechaniczne lub maszyna używana do różnych celów, sterowana i obsługiwana za pomocą technik programowania, nazywana jest robotem. Roboty są różnych typów w oparciu o ich zastosowania, takie jak roboty przemysłowe , roboty wojskowe, roboty kosmiczne, roboty domowe, roboty kroczące, roboty wspinaczkowe i tak dalej. Najbardziej zaawansowany projekty robotyki są opracowywane w celu efektywnego wykorzystania w różnych dziedzinach do różnych zastosowań. W tym artykule omówimy szczególny rodzaj projektów z zakresu robotyki, a mianowicie zautomatyzowany pojazd podążający za pojazdem z mechanizmem chodzenia i wspinania.
Pojazd robotyczny

Projekty robotyki dla studentów inżynierii
Plik pojazdy zrobotyzowane to specjalne typy maszyn zaprojektowane do samodzielnego poruszania się na ziemi, w powietrzu, pod wodą iw przestrzeni kosmicznej bez człowieka na pokładzie. Te roboty-pojazdy są kontrolowane i obsługiwane przez różne czujniki oparte na systemach sterowania. Pojazdy zrobotyzowane są specjalnie zaprojektowane do użytku w warunkach, w których ludzie nie mogą wejść, takich jak wypadki pożarowe, bardzo wysokie lub bardzo niskie temperatury itp.
Robot popychający linię

Robot popychający linię
Zautomatyzowany pojazd, który porusza się po określonej ścieżce lub linii, można określić jako robot śledzący linię . Te roboty podążające za linią są specjalnie używane w zastosowaniach przemysłowych do specjalnych celów, takich jak transport różnych części lub maszyn lub pojazdów (samochodów, rowerów itp.), Poprzez podążanie określoną linią z jednego punktu (jednostki wytwórczej) do innego punktu (jednostka montażowa) .
Normalna linia podążająca za pojazdem robotycznym ze specjalnymi funkcjami, takimi jak mechanizm chodzenia i wspinania się, jest jednym z ciekawe projekty robotyki dla studentów inżynierii , które można wykorzystać do wielu zastosowań. Poniżej przedstawiono proste kroki, aby zaprojektować robota śledzącego linię z mechanizmem chodzenia i wspinania się.
Krok 1: Zbieranie wymaganych komponentów

Komponenty elektryczne i elektroniczne
Elementy potrzebne do zaprojektowania linii podążającej za pojazdem zrobotyzowanym z mechanizmem krocząco-wspinającym mają być oszacowane na podstawie zastosowania robota. Zbierz wszystkie komponenty elektryczne i elektroniczne, takie jak rezystory, kondensatory, nadajniki podczerwieni, silniki prądu stałego, tranzystory, korpus robota i fotodiody wraz z innymi częściami, takimi jak karton, śruby, nakrętki, paski aluminiowe itp., Zgodnie z wymaganiami.
Krok 2: Analiza obwodu robota popychacza linii

Linia podążająca za pojazdem-robotem, którą można rozbudować do schematu blokowego robota chodzącego i wspinającego się
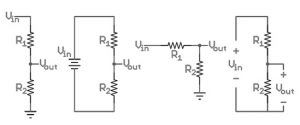
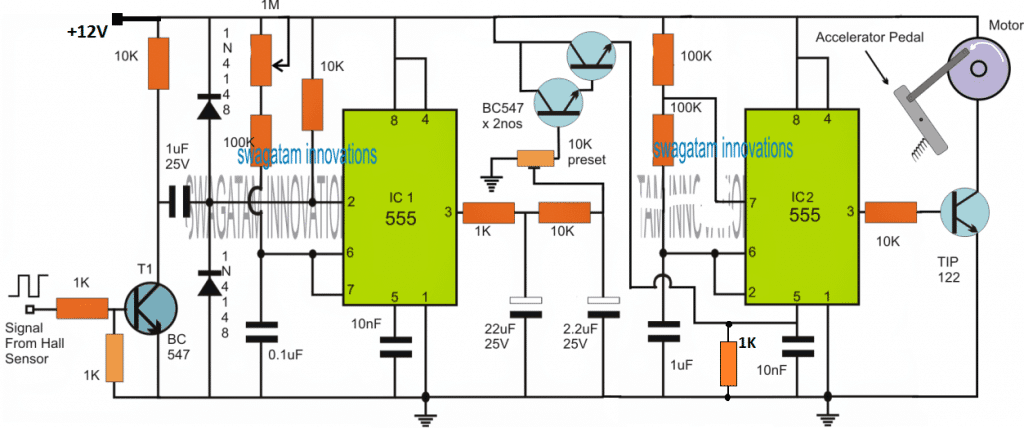
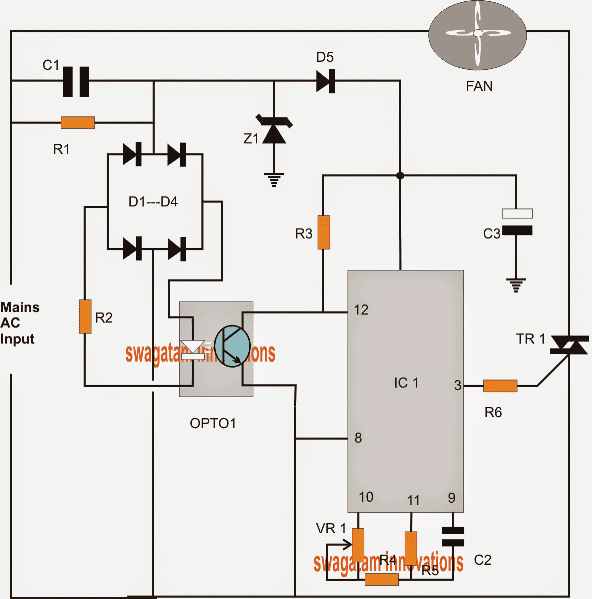
Przede wszystkim zaprojektuj schemat blokowy obwodów projektu z różnymi blokami, takimi jak blok zasilania , Dioda podczerwieni i blok fotodiody i tak dalej. Po zebraniu komponentów przeanalizuj projekt obwodu w oparciu o działanie różnych użytych komponentów. Następnie umieść komponenty na nielutowanej płytce stykowej zgodnie ze schematem obwodu, używając przewodów łączących do sprawdzenia działania obwodu przed montażem obwodu na PCB. Testując obwód na płytce prototypowej bez lutowania, jeśli wymagane są jakiekolwiek zmiany w obwodzie lub wartości znamionowe komponentów, można łatwo wykonać zmiany bez marnowania pieniędzy i czasu na wymianę komponentów lub zmianę projektu obwodu.
Krok 3: Montaż i lutowanie komponentów

Linia podążająca za pojazdem robotycznym z możliwością rozbudowy do projektu robota chodzącego i wspinającego
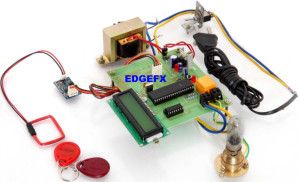
Dlatego po przeanalizowaniu projektu obwodu zmontuj komponenty zgodnie ze schematem obwodu na PCB. Następnie przylutuj obwód za pomocą lutownicy i drutu lutowniczego, postępując zgodnie z odpowiednimi wytycznymi dotyczącymi lutowania. Połącz wszystkie części robota prawidłowo, aby utworzyć robota podążającego za linią, jak pokazano na powyższym obrazku, i przyklej części pojazdu zautomatyzowanego, jeśli to konieczne.
Krok 4: Praca robota popychającego linię
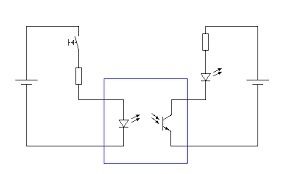
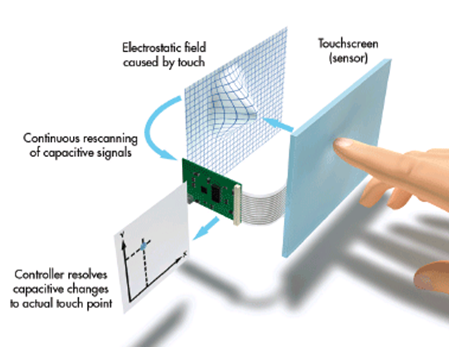
Nadajnik podczerwieni i fotodioda są używane jako czujnik Zdjęcia para, której można użyć do wykrywania określonej ścieżki ruchu robota podążającego za linią podczas chodzenia i wspinania się po ścianach. Para fotoczujników daje odpowiednie sygnały do przełączania tranzystorów do sterowania silnikami robota popychacza linii.
Krok 5: Zautomatyzowany pojazd z popychaczem liniowym z mechanizmem chodzenia i wspinania
Jest ich wiele projekty robotyki dla studentów inżynierii w którym zrobotyzowany pojazd śledzący linię z mechanizmem chodzenia i wspinania to innowacyjny i ciekawy projekt do samodzielnego zaprojektowania przy użyciu naszego bezpłatnego eBooka do projektowania projektów elektronicznych.
Plik zastosowanie robotyki szybko rośnie w naszym codziennym życiu w kilku funkcjach, takich jak zastosowania przemysłowe, przenoszenie lub podnoszenie ciężkich produktów, transport na ograniczonym obszarze przez podążanie określoną ścieżką, przetwarzanie, spawanie, sprzęt gospodarstwa domowego, autonomiczne roboty, roboty wojskowe do ograniczania liczby ludzi zaangażowanie i niebezpieczeństwo, roboty współpracujące do interakcji z człowiekiem, np. do wykonywania kilku zadań, roboty edukacyjne, roboty mobilne i humanoidy.
Jesteś zainteresowany projektowaniem projekty elektroniczne samemu? Czy wiesz, jak rozwijać humanoidalne roboty? Jeśli chcesz dowiedzieć się więcej o projektach robotyki dla studentów inżynierii, możesz zamieścić swoje zapytania, komentarze, pomysły i sugestie w sekcji komentarzy poniżej, aby uzyskać pomoc techniczną.