
DO robot jest maszyną elektromechaniczną sterowane przez obwód lub program komputerowy. Roboty wymieniają się ludźmi, aby wykonywać ciągłe i niebezpieczne zadania, których ludzie nie chcą wykonywać. Teraźniejszość roboty są podzielone na różne kategorie w oparciu o ich funkcje i wydajność, takie jak roboty przemysłowe, roboty komercyjne, roboty usługowe, roboty mobilne. Oto robot usługowy, który wykonuje ciągłe zadania powitania ludzi ruchem ręki reprezentującym „Namaste” poprzez nagraną wiadomość głosową. Generalnie, gdy zapraszamy ludzi do domu, na przyjęcia, uroczystości weselne, do biura itp. Musimy umówić osobę na przywitanie i zaproszenie przy wejściu. Jeśli liczba osób jest niewielka, zadanie jest prostsze. Ale jeśli witasz setki ludzi, zadanie jest trudne. Aby przezwyciężyć ten problem, oto projekt, a mianowicie robot namaste ze sterowaniem głosowym.

Namaste Robot
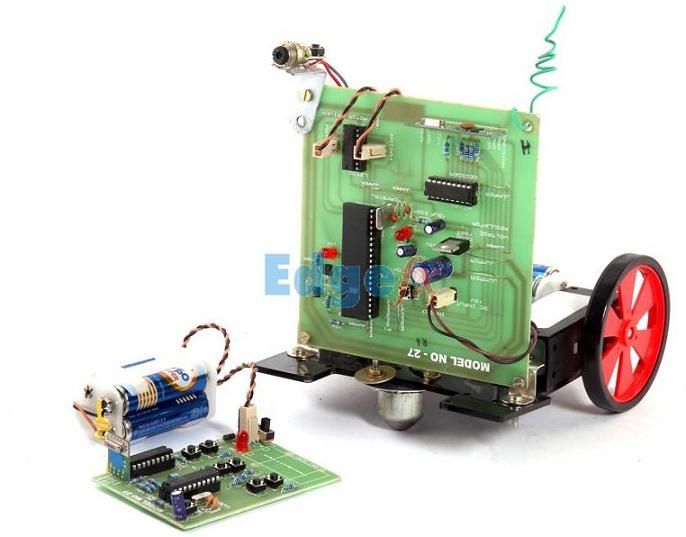
Namaste Robot ze sterowaniem głosowym
Główna koncepcja tego Namaste Projekt robota polega na sterowaniu różnymi silnikami serwo przez płytkę Arduino. Ten robot skanuje otaczających ludzi i obraca głowę o 180 °. Jeśli rozpozna kogoś w pobliżu, życzy tej osobie z Namaste obiema rękami ściskającymi razem. Jest to tradycyjny sposób składania życzeń ludziom w Indiach. Plik zastosowania robotów angażować się w centra handlowe, parki, biura, aby przyciągnąć ludzi.
Schemat blokowy robota Namastae ze sterowaniem głosowym
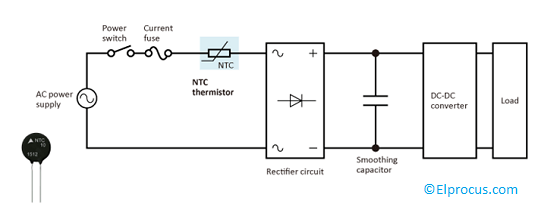
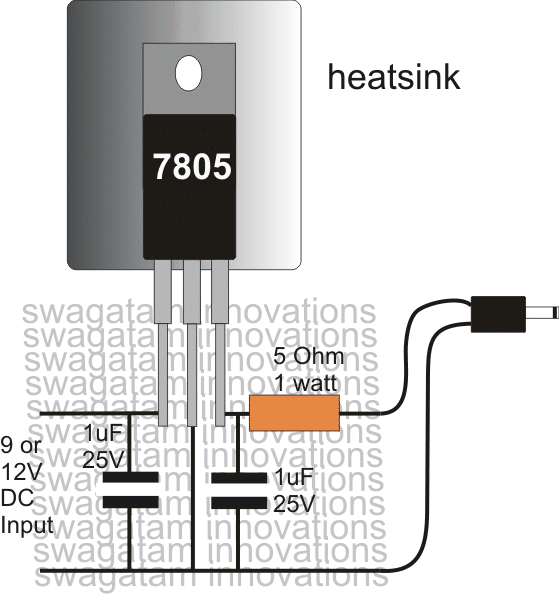
Poniższy rysunek przedstawia schemat blokowy robota Namaste sterowanego głosem. W tego rodzaju robotach programuje się polecenia głosowe. Cała płytka rozwojowa może być podłączona do wspólnego źródła zasilania. Opis każdego bloku jest następujący. Plik zasilacz zapewnia zasilanie dla wszystkich modułów. Moduły te wymagają prądu w mA, a napięcie robocze będzie wynosić 5 V.

Schemat blokowy robota Namastae ze sterowaniem głosowym
Płytka Arduino
Arduino to jedyne w swoim rodzaju narzędzie oparty na prostej płycie mikrokontrolera używanej do sterowania i wyczuwania świata fizycznego niż komputer stacjonarny. Dostępne są różne platformy mikrokontrolerów do obliczeń fizycznych. Ważnymi cechami Arduino są niedrogie, otwarte i rozszerzalne oprogramowanie. Oprogramowanie Arduino jest dostępne jako narzędzie open source, a język można rozszerzyć za pomocą bibliotek C ++.

Płytka Arduino
Czujnik ping
Czujnik ping wykorzystuje SONAR do kontrolowania odległości obiektu w jego pobliżu. To czujnik jest używany jako oczy robota, aby wyczuć przeszkodę, na przykład czujnik zbliżeniowy. Zapewnia doskonałą dokładność zakresu i stabilne odczyty. Na działanie tego czujnika nie ma wpływu czarny materiał ani światło słoneczne. Specyfikacje czujnika ping to napięcie 5 V, prąd 15 mA, kąt czujnika NIE> = 15 i odległość wykrywania 2 cm ~ 450 cm.

Czujnik ping
Poniżej pokazano połączenie czujnika ping z Arduino. Dostępne są cztery piny do połączenia czujnika ping z płytką Arduino. Cztery piny na płycie Arduino to GND, VCC, ECHO i TRIGGER. Piny na płycie to D0-D13, w tym 12 i 13 pinów to piny wejściowe i wyjściowe.
Mikrokontroler Arduino oferuje nam bibliotekę sterowania serwomechanizmami, która pozwala nam z łatwością przełączać serwomechanizmy. W tym projekcie użyliśmy 5 serw do regulacji ruchów robota Namaste, takich jak głowa, prawy łokieć, lewy łokieć, prawe ramię i lewe ramię. Tutaj cyfrowe piny wejścia / wyjścia (D5, D6, D9, D10, D1) oznaczają na płycie Arduino połączonej z serwomotorami.
Odtwarzanie głosu IC
Ten układ scalony odtwarzania głosu oferuje nagraną wiadomość, która jest odtwarzana z predefiniowaną częstotliwością. Odtwarzanie jest przenoszone do jednostki wzmacniającej dźwięk.

Odtwarzanie głosu IC
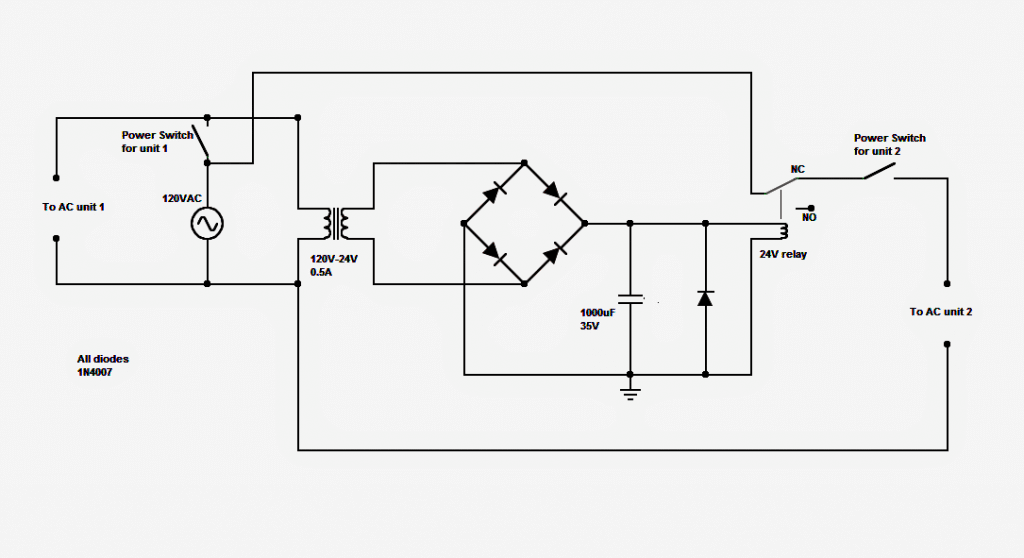
Przekaźnik
DO przekaźnik to jeden rodzaj przełącznika działa elektrycznie. Przepływ prądu przez cewkę przekaźnika wytwarza pole magnetyczne, które zaprasza dźwignię i zmienia styki przełącznika.

Przekaźnik
Praca robota Namastae Voice Control
Pracę robota Namaste można przeprowadzić krok po kroku wraz z symulowanymi wynikami. A zatem, kiedy robot Namaste jest w pierwszym stanie silnik serwo s robota 2, 3, 4, 5 są w stanie WYŁĄCZONY lub w stanie zerowym. Głowa robota Namaste przemieszcza się naprzemiennie ze środka na prawo, w lewo, a następnie z powrotem na środek z powodu obrotu silnika Servo1 od 0 ° -180 °. Ruch głowy robota wskazuje, że robot Namaste szuka przeszkody. Gdy czujnik ping wykryje jakąkolwiek przeszkodę, pozycja głowy robota wraca do środka, a silnik Servo1 pozostaje pod kątem 90 ° i zostaje wyłączony. Jest aktywowany w stanie NISKIM.
Gdy silnik serwo 1 zostanie wyłączony, wówczas pozostałe silniki, takie jak servo4 i servo5, włączą się. Linia sygnałowa jest uruchamiana dla prawego i lewego ramienia robota Namaste. Teraz ręce robota mogą wykonać ruch. Serwomotory ramion są podłączone do cyfrowych pinów wejściowych i wyjściowych na płycie Arduino. Ale linie sygnałowe lub te piny będą wysokie, a pozycja serwomechanizmu zostanie zmieniona na 90 °. Teraz servo4 i servo 5 wyłączają się.
Wreszcie możemy stwierdzić, że głównym celem tej kontroli głosowej robot ma świadczyć usługę grzecznego witania ludzi poprzez wykrywanie ludzi idących przed nim. Może być używany w różnych miejscach publicznych, takich jak parki, centra handlowe, imprezy itp. Mamy nadzieję, że lepiej zrozumieliście tę koncepcję. Ponadto wszelkie pytania dotyczące tej koncepcji lub oparte na arduino projekty robotów , podaj cenne sugestie, komentując w sekcji komentarzy poniżej.
Kredyty fotograficzne:
- Płytka Arduino nyacknewsandviews
- Czujnik ping paralaksa
- Odtwarzanie głosu IC kealab
- Przekaźnik awdirect
- Namaste Robot canstockphoto





{kind=link}
{kind=link}
{kind=link}
{kind=link}