
Postęp technologiczny doprowadził do opracowania inteligentnej techniki interfejsu człowiek-maszyna, która ułatwia obsługę komputerów, maszyn lub robotów za pomocą poleceń głosowych wydawanych przez człowieka bez korzystania z jakichkolwiek systemów wejściowych, takich jak klawiatura lub mysz. Ten interfejs człowiek-maszyna (HMI) można uzyskać za pomocą rozpoznawanie głosu moduły. W tym artykule omówimy moduły rozpoznawania głosu wraz z ich procedurą działania i zastosowaniami.

Moduł głosowy
Moduł rozpoznawania głosu
Rozpoznawanie głosu to technika ułatwiająca naturalne i wygodne interfejs człowiek-maszyna za pomocą modułu rozpoznawania głosu. Wyodrębnia i analizuje cechy głosu człowieka przesyłanego do maszyny lub komputera przez mikrofon. Technika rozpoznawania głosu dzieli się na wiele typów w oparciu o różne kryteria, takie jak zakres użytkowników, liczba słów używanych do rozpoznawania, naturalność mówienia. Jeśli poziom rozpoznawania głosu przekracza 95%, praktycznie używane jest tylko rozpoznawanie głosu.
Zasada działania modułu rozpoznawania głosu
HM2007 to jednoukładowy CMOS moduł rozpoznawania głosu. Jest to wielkoskalowy, analogowy układ scalony front-end z analizą głosu, rozpoznawaniem mowy i procesami sterowania systemem rozpoznawania głosu. HM2007 może pracować w dwóch trybach: trybie ręcznym i trybie sterowania CPU.

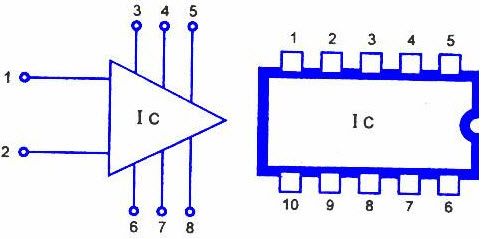
Schemat pinów HM2007
W trybie pracy ręcznej moduł rozpoznawania głosu HM2007 służy do budowy prostego systemu rozpoznawania poprzez podłączenie elementów takich jak klawiatura, pamięć SRAM 8 kB i inne. Jeśli zasilanie jest włączone, HM2007 rozpoczyna proces inicjalizacji, a jeśli pin WAIT ma wartość L, to HM2007 sprawdza pamięć zewnętrzną: 8 kB SRAM - czy jest idealna, czy nie. Ale jeśli WAIT jest H, to proces sprawdzania pamięci zostanie pominięty przez HM2007. Po tym procesie inicjalizacji, HM2007 przechodzi w tryb rozpoznawania. W trybie rozpoznawania, jeśli pinem WAIT jest H, to HM2007 jest gotowy do przyjęcia głosu i rozpoczyna proces rozpoznawania. Jeśli pin WAIT to L, oznacza to, że HM2007 nie akceptuje głosu, który ma zostać rozpoznany. Następnie uczenie nowych wzorców przez usuwanie wytrenowanych wzorców to dwie operacje wykonywane za pomocą klawiszy funkcyjnych: TRN i CLR. Wszystkie wzory w HM2007 można usunąć, wprowadzając klawisz numeryczny 99 i naciskając klawisz CLR.
W trybie sterowania CPU, kilka funkcji, takich jak RECOG, TRAIN, RESULT, UPLOAD, DOWNLOAD, RESET funkcji modułu rozpoznawania głosu HM2007 jest dostępnych w tym trybie. Podobnie jak w ręcznym trybie pracy, w tym trybie również włączanie, rozpoznawanie, uczenie, wynik, ładowanie, pobieranie i resetowanie są wykonywane w oparciu o różne kryteria.
Zastosowania modułu rozpoznawania głosu
Robot sterowany głosem

Zestaw do projektu robota sterowanego głosem
Zautomatyzowany pojazd sterowany głosem z systemem rozpoznawania mowy na duże odległości jest przeznaczony do sterowania za pomocą interfejsu człowiek-maszyna i poleceń głosowych do zdalnych operacji pojazdu-robota. Na Mikrokontroler 8051 jest używany razem z modułem rozpoznawania głosu lub modułem rozpoznawania mowy w celu osiągnięcia żądanej operacji. Kierunek ruchu pojazdu robota można kontrolować za pomocą poleceń głosowych lub przycisków. Polecenia głosowe są wysyłane przez RF od końca nadającego w kierunku odbierającego. W ten sposób zautomatyzowany pojazd porusza się do przodu, do tyłu, w lewo lub w prawo w oparciu o polecenia otrzymane przez odbiornik.

Schemat blokowy nadajnika zautomatyzowanego pojazdu sterowanego głosem
Ten ruch pojazd robotyczny w określonym kierunku może być sterowany za pomocą dwóch silników, które są połączone z mikrokontrolerem serii 8051. Nadajnik RF konwertuje polecenia za pomocą przycisku przełącznika lub poleceń głosowych, które są konwertowane na zakodowane dane cyfrowe z korzyścią dla dopuszczalnego zasięgu (do 200 metrów) od pojazdu robota. Zakodowane dane odebrane w obwodzie odbiornika są dekodowane i wysyłane do innego mikrokontrolera w celu sterowania silnikami prądu stałego z wykorzystaniem układu scalonego sterownika silnika do sterowania kierunkiem i ruchem silników z wykorzystaniem dekodowanych danych poleceń głosowych.

Schemat blokowy odbiornika zautomatyzowanego pojazdu sterowanego głosem
Ten robot-pojazd sterowany głosem z projektami rozpoznawania mowy na duże odległości może być zintegrowany z Technologia DTMF który ułatwia sterowanie zautomatyzowanym pojazdem za pomocą telefonu komórkowego. Ta technologia DTMF zapewnia komunikację o bardzo dużym zasięgu w porównaniu z technologią RF - dzięki temu zrobotyzowane pojazdy mogą być sterowane zdalnie z bardzo dużej odległości.
Obwód nagrywania i odtwarzania głosu
APR 9301 IC

APR 9301 IC
Układ scalony APR 9301 składa się z 28 pinów i nieulotnej pamięci flash. Ułatwia rejestrację 100 000 cykli i przechowywanie w pamięci przez około 100 lat. Do normalnej pracy układu scalonego APR 9301 potrzebne jest tylko niskie napięcie 5V i 25mA.
Działanie obwodu nagrywania i odtwarzania głosu
APR 9301 IC wykonuje nagrywanie i odtwarzanie głosu operacje. Operację nagrywania można przeprowadzić odbierając sygnały głosowe przy użyciu dobrej jakości (dowolnego rodzaju) mikrofonu pojemnościowego podłączonego do 17 i 18 pinów układu scalonego. Jeśli zamkniemy przełącznik S1, to można uruchomić tryb nagrywania, aby łatwo nagrać wiadomość głosową przez 20-30 sekund. Jako wskazanie nagrywania dioda LED podłączona do styku 25 układu scalonego APR 9301 będzie migać, dopóki pin 27 L jest uziemiony.

Obwód nagrywania i odtwarzania głosu
Po wykonaniu 20 cykli z ostatnią pamięcią, proces rejestracji kończy się automatycznie poprzez zmianę wartości rezystora R1 podłączonego do pinów 6 i 7 układu APR 9301. Maksymalny czas nagrywania wynoszący 20 sekund, 24 sekundy i 30 sekund można uzyskać zmieniając wartości rezystora R1 na odpowiednio 52K, 67K i 89K.
Sekcja wejściowa jest automatycznie wyciszana w trybie odtwarzania. Jeśli przełącznik S2 jest zamknięty, od mówcy nadejdzie wiadomość od początku nagranych wiadomości. Jeśli funkcje nagrywania lub odtwarzania zostaną zakończone, układ scalony APR 9301 przejdzie w tryb gotowości.
Ten obwód może być gromadzony na wspólnej płytce drukowanej. Przylutuj dokładnie podstawę układu APR 9301 tak, aby nie doszło do zwarcia między pinami układu scalonego. Sprawdź obwód po zamontowaniu go na PCB, a następnie podłącz układ scalony do podstawy układu. Przed podłączeniem zasilania do obwodu należy dokładnie sprawdzić połączenia pinów. 5-woltowy zasilacz oparty na układzie scalonym służy do zasilania obwodu. Zastosowano 2-calowy, 8-omowy głośnik dobrej jakości, aby uzyskać czysty dźwięk. Nagrywanie można wykonać, naciskając przełącznik S1. Sygnały dźwiękowe (mowa lub muzyka) są odbierane przez mikrofon i przekazywane do układu scalonego, w którym sygnały głosowe są przechowywane w komórkach pamięci. Jeśli zamkniemy przełącznik S2, rozpocznie się odtwarzanie i przez głośnik usłyszymy nagraną wiadomość.
Moduł rozpoznawania głosu może być używany w wielu zastosowaniach, takich jak sterowanie systemami samolotu za pomocą poleceń głosowych pilotów, sterowanie samochodem z kołami silnikowymi za pomocą wieloprocesora uruchamianego głosem i tak dalej. Jeśli chcesz wiedzieć o projekty elektryczne i elektroniczne w oparciu o moduł rozpoznawania głosu, możesz skontaktować się z nami, zamieszczając swoje komentarze w sekcji komentarzy poniżej.
Kredyty fotograficzne:
- APR 9301 IC elektrochemia
- HM 2007 emartee






{kind=link}