
CAN lub Controller Area Network to dwuprzewodowa, półdupleksowa, szybka technologia sieci szeregowej. Zasadniczo jest używany w komunikacji między różnymi urządzeniami w regionie o małym promieniu, takim jak samochód. Protokół CAN jest protokołem CSMA-CD / ASM lub arbitrażem wykrywania kolizji wielokrotnego dostępu w oparciu o protokół priorytetu wiadomości. CSMA zapewnia, że każdy węzeł musi czekać przez określony czas przed wysłaniem jakiejkolwiek wiadomości. Wykrywanie kolizji zapewnia uniknięcie kolizji, wybierając wiadomości na podstawie przypisanego priorytetu.
Zapewnia szybkość sygnalizacji od 125 kb / s do 1 Mb / s. Zapewnia 2048 różnych identyfikatorów wiadomości.
Jest to standard ISO-11898 i wykorzystuje 7-warstwowy model Open Systems Interconnection.
Historia:
Został opracowany przez Roberta Boscha w 1982 r. I oficjalnie wydany przez Stowarzyszenie Inżynierów Motoryzacyjnych w Detroit w 1986 r. Pierwszy samochód z wbudowaną magistralą CAN został wyprodukowany przez Mercedes Benz w 1992 r.
Architektura ISO 11898:

Źródło obrazu - theremino
Architektura warstwowa składa się z trzech warstw
- Warstwa aplikacji : Współdziała z systemem operacyjnym lub aplikacją na urządzeniu CAN.
- Warstwa łącza danych : Łączy rzeczywiste dane z protokołem pod względem wysyłania, odbierania i sprawdzania poprawności danych.
- Warstwa fizyczna : Przedstawia rzeczywisty sprzęt.
Standardowa ramka CAN składa się z następujących bitów:
 Standardowa ramka CAN składa się z następujących bitów:
Standardowa ramka CAN składa się z następujących bitów:
- SOF- Początek ks ame. Wiadomość zaczyna się od tego miejsca.
- Zidentyfikować : Decyduje o priorytecie wiadomości. Im niższa wartość binarna, tym wyższy priorytet. Jest 11-bitowy.
- RTR - Żądanie transmisji zdalnej. Jest dominujący, gdy wymagane są informacje z innego węzła. Każdy węzeł otrzymuje żądanie, ale tylko ten węzeł, którego identyfikator jest zgodny z identyfikatorem komunikatu, jest węzłem wymaganym. Każdy węzeł również otrzymuje odpowiedź. Z
- TUTAJ - Rozszerzenie pojedynczej identyfikacji. Jeśli jest dominujący, oznacza to, że przesyłany jest standardowy identyfikator CAN bez rozszerzenia.
- R0 - zarezerwowany bit.
- DLC - Kod długości danych. Określa długość wysyłanych danych. To jest 4 bity
- Dane - Można przesłać do 64 bitów danych.
- CRC - Cykliczna kontrola nadmiarowa. Zawiera sumę kontrolną (liczbę przesłanych bitów) danych poprzedniej aplikacji do wykrywania błędów.
- NIESTETY - Potwierdzam. To jest na 2 bity. Dominuje, jeśli otrzyma się dokładną wiadomość.
- EOF - koniec ramy. Oznacza koniec ramki puszki i wyłącza wypychanie bitów.
- IFS - Przestrzeń między klatkami. Zawiera czas potrzebny kontrolerowi na przesunięcie poprawnie odebranej ramki do właściwej pozycji.
5 Różne typy wiadomości to:
- Ramka danych : Składa się z dowolnego pola, pola danych, pola CRC i pól potwierdzenia.
- Ramka zdalna : Żąda transmisji danych z innego węzła. Tutaj bit RTR jest recesywny.
- Ramka błędu : Jest przesyłany w przypadku wykrycia błędu.
- Ramka przeciążenia : Służy do zapewnienia opóźnienia między wiadomościami. Jest przesyłany, gdy węzły są zbyt zajęte.
- Ważna ramka : Komunikat jest ważny, jeśli pole EOF jest recesywne. W przeciwnym razie wiadomość zostanie przesłana ponownie.
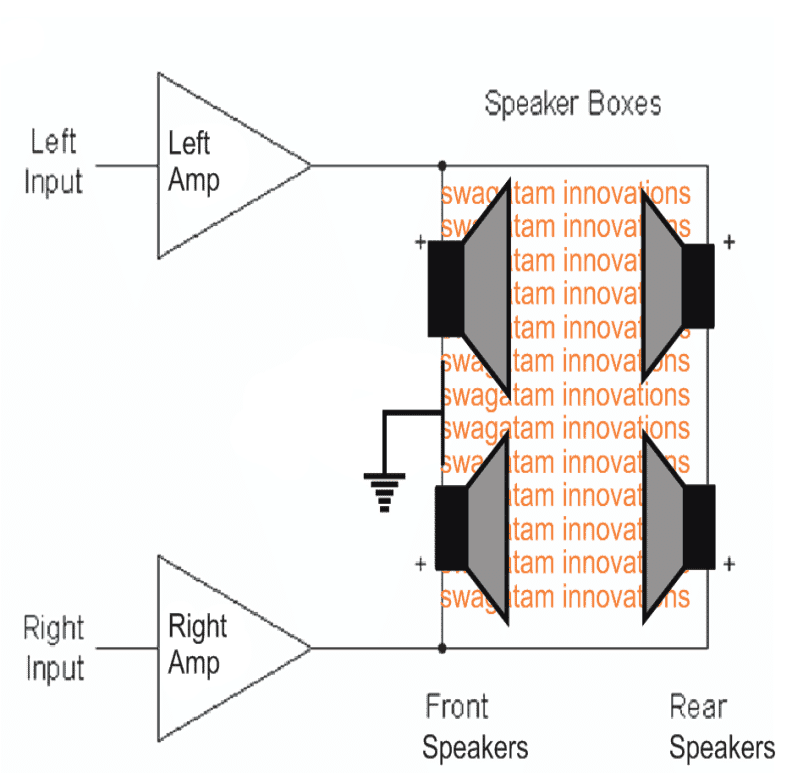
Warstwa fizyczna CAN:
Magistrala CAN

Źródło obrazu - digital.ni
Składa się z dwuprzewodowego łącza szeregowego - CAN_H i CAN_L, a ich poziomy napięć względem siebie określają, czy przesyłane jest 1 czy 0. To jest sygnalizacja różnicowa. Prąd płynący w każdej linii sygnału jest równy, ale przeciwny do kierunku, co skutkuje efektem eliminacji pola, który jest kluczem do niskiej emisji szumów. Zapewnia to zrównoważoną sygnalizację różnicową, która zmniejsza sprzężenie szumów i umożliwia wysoką szybkość transmisji przez przewody. Zwykle są to skrętki dwużyłowe o długości magistrali 40 mi maksymalnie 30 węzłów. Jest to kabel ekranowany lub nieekranowany o charakterystycznej impedancji 120 Ohm.
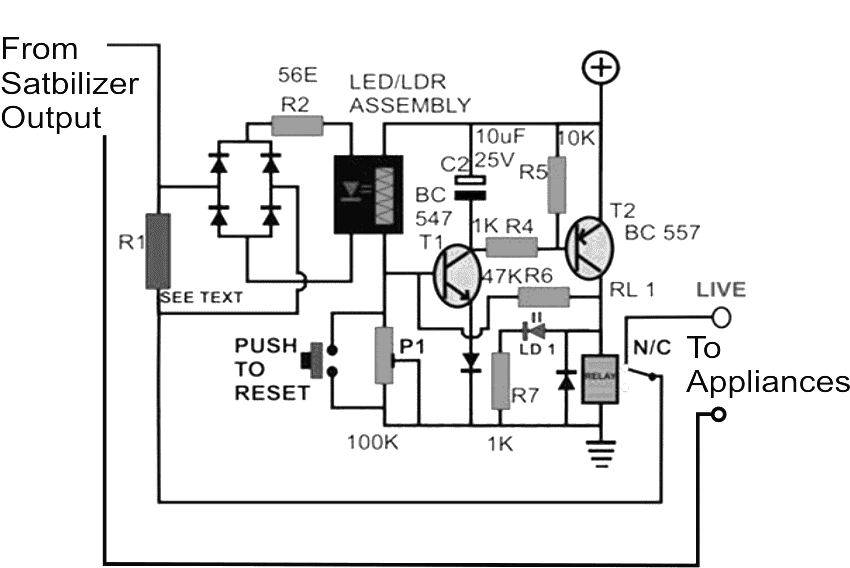
CAN TRANSCEIVER:

CAN dla pojazdów firmy Hugo Provencher. Dwa przewody CANH i CANL mają zwykle napięcie 2,5 V określone przez dwa tranzystory i źródło napięcia 2,5 V. Zasadniczo różnica między dwoma przewodami powinna zawsze wynosić 0. Sterownik sterownika określa napięcie przyłożone do przewodów CANH i CANL. Gdy oba tranzystory przewodzą, spadek napięcia na 1śwtranzystor i dioda to 1,5V, co powoduje, że przewód CANH podciąga się do 3,5V. Spadek napięcia na 2ndtranzystor i dioda to 1V, co powoduje, że przewód CANL jest obniżony do 1,5V. Diody służą do ochrony przed wysokim napięciem. Odbiornik jest obwodem dyskryminatora, który daje wyjście 1, gdy dwa wejścia CANH i CANL są takie same, oraz wyjście 0, jeśli oba wejścia są różne. Dominujący blok TXD jest używany do ochrony przed zwarciami doziemnymi, a blok wyłączania termicznego wyłącza sterowanie sterownika w przypadku przegrzania diod i tranzystorów.
Zalety CAN:
- Zmniejsza ilość okablowania, ponieważ jest to sterowanie rozproszone, a to zapewnia poprawę wydajności systemu.
- Wielu producentów chipów CAN dostarczyło warstwę łącza danych i warstwę fizyczną połączoną z chipem, a jedyne, co musi zrobić programista, to opracować kodowanie aplikacji.
- Zapewnia możliwość pracy w różnych środowiskach elektrycznych i zapewnia cichą transmisję.
- Zatory w ruchu są eliminowane, ponieważ komunikaty są przesyłane w oparciu o ich priorytet i pozwala całej sieci spełnić ograniczenia czasowe.
- Zapewnia bezbłędną transmisję, ponieważ każdy węzeł może sprawdzić błędy podczas transmisji komunikatu i wysłać ramkę błędu.
Przykład roboczy CAN:
Kontroler Area Network ma szerokie zastosowanie zarówno w przemyśle, jak iw pojazdach. Jedna z głównych aplikacji jest związana z komunikacją między różnymi urządzeniami w pojeździe. Innym może być wśród różnych mikrokontrolerów, przypuszczalnie do wykrywania hasła, używanych do spełnienia wszelkich wymagań, takich jak otwieranie zamkniętych drzwi za pomocą hasła lub włączanie żarówki itp.

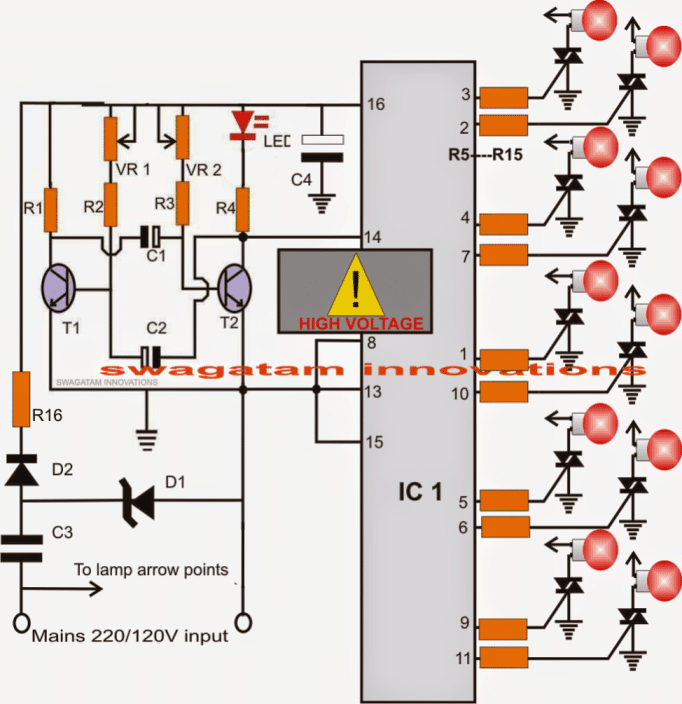
Obwód sieci kontrolera
Podstawowa aplikacja to 3 mikrokontrolery komunikujące się ze sobą dwoma przewodami jak w sieci CAN. 1śwmikrokontroler jest połączony z klawiaturą, 2ndz wyświetlaczem LCD, a trzeci z brzęczykiem i przekaźnikiem obsługującym lampę. Po wprowadzeniu hasła na klawiaturze 2ndmikrokontroler działa jako odbiornik i odbiera transmitowaną wiadomość bit po bicie od 1śwnadajnika i wyświetla komunikat na wyświetlaczu LCD. Gdy cała wiadomość zostanie przesłana, 2ndmikrokontroler dokonuje weryfikacji iw przypadku błędnego hasła wysyła sygnał do 3r & DMikrokontroler, który z kolei wysyła brzęczyk jest włączany tym sygnałem. Gdy hasło jest prawidłowe, 3r & Dmikrokontroler włącza przekaźnik, który z kolei włącza lampę.








{kind=link}
{kind=link}