W tym projekcie nauczymy się, jak wykonać prosty jednobiegunowy obwód sterownika silnika krokowego przy użyciu układu scalonego 555 timera. Oprócz timera 555 potrzebujemy również IC CD 4017, który jest układem scalonym licznika dekad.
Ankit Negi
Do tego obwodu można podłączyć dowolny silnik jednobiegunowy w celu wykonania określonego zadania, chociaż najpierw należy wprowadzić niewielkie zmiany.
Prędkość silnika krokowego można regulować potencjometrem podłączonym między rozładowaniem a progiem pin 555 timera .
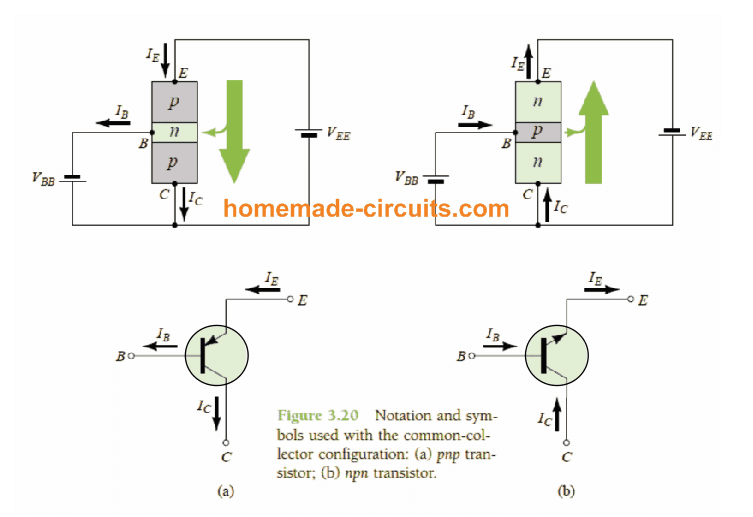
Podstawy silnika krokowego
Silniki krokowe są używane w obszarach, w których wymagana jest określona wielkość obrotu, której nie można osiągnąć za pomocą zwykłych silników prądu stałego. Typowe zastosowanie silnika krokowego to DRUKARKA 3D. Znajdziesz u nas dwa typy popularnych silników krokowych: UNIPOLAR i BIPOLAR.
Jak nazwa sugeruje, jednobiegunowy silnik krokowy zawiera uzwojenia ze wspólnym przewodem, które można łatwo zasilać pojedynczo.
Natomiast silnik krokowy bipolarny nie ma wspólnego zacisku między cewkami, przez co nie można go napędzać po prostu za pomocą proponowanego obwodu. Do napędzania bipolarnego silnika krokowego potrzebujemy obwodu mostka H.
SKŁADNIKI:
1. 555 TIMER IC

dwa. CD 4017 IC

3. REZYSTORY 4,7K, 1K


4. POTENCJOMETR 220K

5. 1 uf KONDENSATOR

6. 4 DIODY 1N4007

7. 4 TRANZYSTORY 2N2222

8. JEDNOBIEGUNOWY SILNIK KROKOWY

9. ŹRÓDŁO ZASILANIA DC
CEL TIMERA 555:
Wymagany jest tu zegar 555 do generowania impulsów zegarowych o określonej częstotliwości (można ją zmieniać za pomocą potencjometru 220k), która określa prędkość silnika krokowego.
Szczegóły wyprowadzeń IC 555

CEL CD4017:
Jak już wspomniano powyżej, jest to układ scalony licznika dekad, czyli może zliczać do 10 impulsów zegarowych. To, co wyróżnia ten układ scalony, to fakt, że ma on wbudowany dekoder. Dzięki temu nie musisz dodawać dodatkowego układu scalonego do dekodowania liczb binarnych.
4017 liczy do 10 impulsów zegara od 555 godzin i daje wysoką moc wyjściową odpowiadającą każdemu impulsowi zegara jeden po drugim z jego 10 pinów wyjściowych. W danym momencie tylko jeden pin jest wysoki.
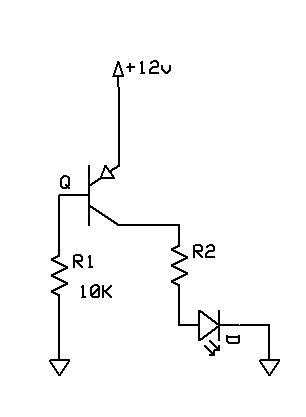
CEL TRANZYSTORÓW:
Istnieją dwa cele tranzystora:
1. Tranzystory działają tutaj jak przełączniki, zasilając w ten sposób jedną cewkę na raz.
2. Tranzystory umożliwiają przepływ wysokiego prądu przez nie, a następnie przez silnik, co całkowicie wyklucza zegar 555, ponieważ może dostarczać bardzo niewielką ilość prądu.
SCHEMAT OBWODU:

Wykonaj połączenia, jak pokazano na rysunku.
1. Podłącz pin 3 lub pin wyjściowy timera 555 do pinu 14 (pin zegara) układu IC 4017.
2. Podłączyć pin włączający lub 13. pin 4017 do masy.
3. Podłączyć kolejno piny 3, 2, 4, 7 do tranzystorów 1, 2, 3, 4.
4. Podłączyć 10 i 15 pin do uziemienia przez rezystor 1k.
5. Podłączyć wspólny przewód silnika krokowego do plusa zasilania.
6. Pozostałe przewody silnika krokowego podłączamy w taki sposób, aby cewki były zasilane pojedynczo, aby poprawnie wykonać jeden pełny obrót (można zajrzeć do arkusza danych silnika dostarczonego przez producenta)
DLACZEGO WYJŚCIOWY PIN 10 IC 4017 JEST PODŁĄCZONY DO JEGO PINU 15 (PIN RESETOWANIA)?
Jak już wspomniano powyżej, 4017 zlicza impulsy zegara jeden po drugim aż do dziesiątego impulsu zegara i odpowiednio zapewnia wysoką moc wyjściową na pinach wyjściowych, każdy pin wyjściowy przechodzi w stan wysoki.
Powoduje to niepotrzebne opóźnienie w obrotach silnika. Ponieważ potrzebujemy tylko pierwszych czterech pinów na jeden pełny obrót silnika lub pierwsze cztery cyfry po przecinku od o do 3, pin nr. 10 jest podłączony do pinu 15, dzięki czemu po 4. zliczeniu układ scalony jest resetowany i liczenie zaczyna się od nowa. Zapewnia to brak przerw w obrotach silnika.
PRACUJĄCY:
Po prawidłowym wykonaniu połączeń, jeśli włączysz obwód, silnik zacznie się stopniowo obracać. Zegar 555 wytwarza impulsy zegarowe w zależności od wartości rezystora, potencjometru i kondensatora.
Jeśli zmienisz wartość którejkolwiek z tych trzech składowych, częstotliwość impulsu zegara ulegnie zmianie.
Te impulsy zegarowe są podawane do IC CD 4017, który następnie zlicza impulsy zegara jeden po drugim i podaje 1 jako wyjście na styk nr 3, 2, 4, 7 i powtarza ten proces w sposób ciągły.
Ponieważ tranzystor Q1 jest podłączony do pinu 3, włącza się najpierw, a następnie tranzystor Q2, a następnie Q3 i Q4. Ale kiedy jeden tranzystor jest włączony, wszystkie inne pozostają wyłączone.
Kiedy Q1 jest włączony, działa jak zamknięty przełącznik, a prąd przepływa przez wspólny przewód do przewodu 1, a następnie do masy przez tranzystor Q1.
To zasila cewkę 1 i silnik obraca się pod pewnym kątem, który zależy od częstotliwości zegara. Następnie to samo dzieje się z Q2, który zasila cewkę 2, a następnie cewkę 3 i cewkę 4. W ten sposób uzyskuje się jeden pełny obrót.
Po obróceniu potencjometru:
Powiedzmy, że początkowo pozycja potencjometru jest taka, że pomiędzy wyładowaniem a bolcem progowym występuje maksymalny opór (220k). Wzór na częstotliwość wyjściowego impulsu zegarowego to:
F = 1,44 / (R1 + 2R2) C1
Ze wzoru jasno wynika, że częstotliwość impulsów zegara maleje wraz ze wzrostem wartości R2. Zatem, gdy wartość R2 lub potencjometru jest maksymalna, częstotliwość jest minimalna, przez co IC 4017 liczy wolniej i daje bardziej opóźnione wyjście.
Wraz ze spadkiem wartości rezystancji R2 wzrasta częstotliwość, co powoduje minimalne opóźnienie między wyjściami układu IC 4017. W związku z tym silnik krokowy obraca się szybciej.
Tym samym wartość potencjometru określa prędkość silnika krokowego.
WIDEO SYMULACYJNE:
Tutaj można wyraźnie zobaczyć, jak zmienia się prędkość silnika wraz z oporem R2. Jego wartość jest najpierw zmniejszana, a następnie zwiększana, co z kolei najpierw zwiększa, a następnie zmniejsza prędkość silnika krokowego.
Poprzedni: Jak działają latarki korbowe Dalej: Obwód obrotomierza Arduino do precyzyjnych odczytów